
soft-robotics:molds:walker
−Table of Contents
Walker
The “Crawli” walker is a small double actuator that resembles walking when actuated. It is designed by XYZAidan.
Fabrication
The fabrication process is described in detail on the Instructables page.
Mold files
The molds are available for download on Thingiverse.
Quantities
- TBD
Oven times
- Ecoflex 30: ~25min
Air inlet
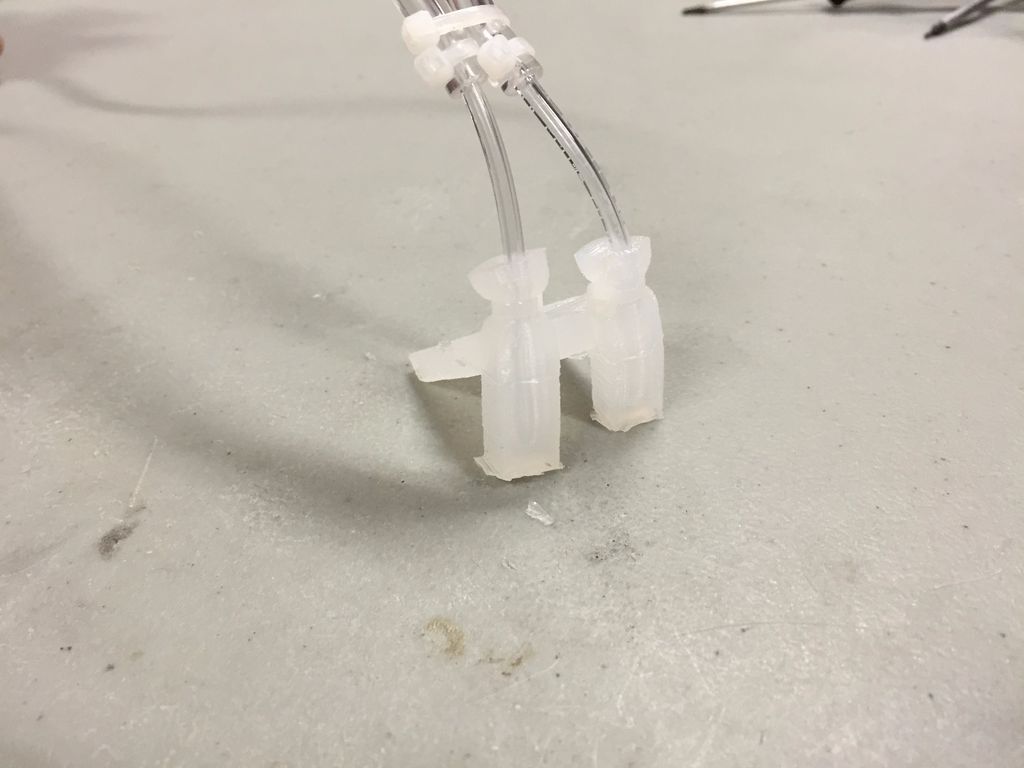
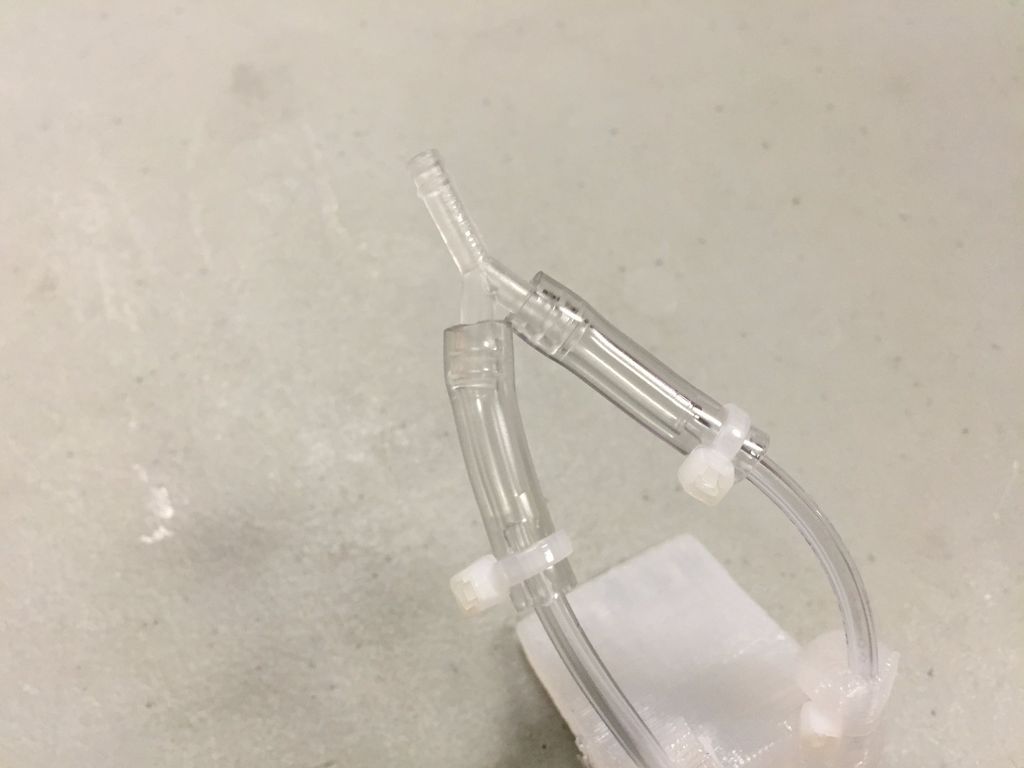
The 2 legs act as sleeves for the tubes and use a Y connector adapter and 2 sizes of tubes.
From the instructables guide:
Now that it is out of the mold, we can connect the tubing. Insert short lengths of the 1/16" tubing into the openings of the legs. Put zip-ties around the points where the tubing and the Crawli meet, as shown in the picture. Then, connect short lengths of the 1/8" tubing to the 1/16" tubing by pushing the 1/16" tubing into the 1/8" tubing. Use zip-ties to keep these connected too. Connect the short ends of the Y-connector to the open ends of the 1/8" tubing. Then use one final zip-tie to tighten the wires together. You can then use a long piece of 1/8" tubing to connect from the Y-connector to your air source.
Issues
Unfortunately, similar to the linear extending actuator, we encountered difficulties with separating the mold from the silicone. We weren't able to test this mold.
soft-robotics/molds/walker.txt · Last modified: 2017/04/26 09:30 by avnerus
Except where otherwise noted, content on this wiki is licensed under the following license: CC Attribution-Noncommercial-Share Alike 4.0 International
