
soft-robotics:molds:slow-bending
Table of Contents
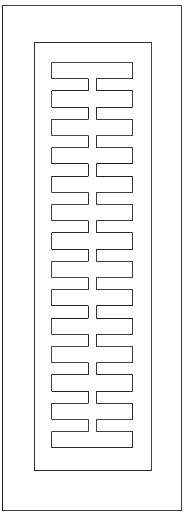
Slow Bending Actuator
The Slow Bending Actuator is a basic Pneunet design that is based on the Slow Pneunet architecture. It is based on a research by Harvard University and the molds on this wiki are designed by Jonas Jørgensen - Researcher at the IT University of Copenhagen.
Fabrication
The fabrication process is based on the slow pneunet design and is similar to the one of the triangle mold and the gripper mold.
Mold files
Here are the mold files for the actuator:
Machine Limitations
The mold can be either 3d printed or laser cut, but the laser cut version would result in a more flat actuator.
Quantities
Basic shape
- Top layer: ~35g
- Base Layer: ~5g
Oven times
Basic shape
- Dragon Skin 30: ~35min
- Ecoflex 30: ~15min
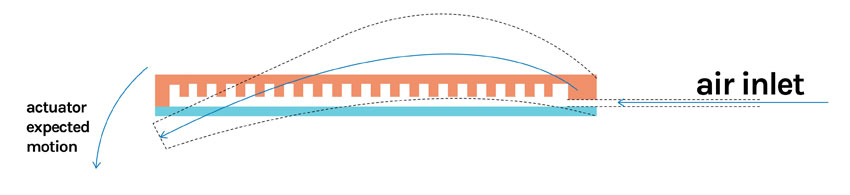
Air inlet
The air inlet is typical for slow pneunet designs:
soft-robotics/molds/slow-bending.txt · Last modified: 2017/05/08 10:04 by avnerus
Except where otherwise noted, content on this wiki is licensed under the following license: CC Attribution-Noncommercial-Share Alike 4.0 International
