
−Table of Contents
Gripper
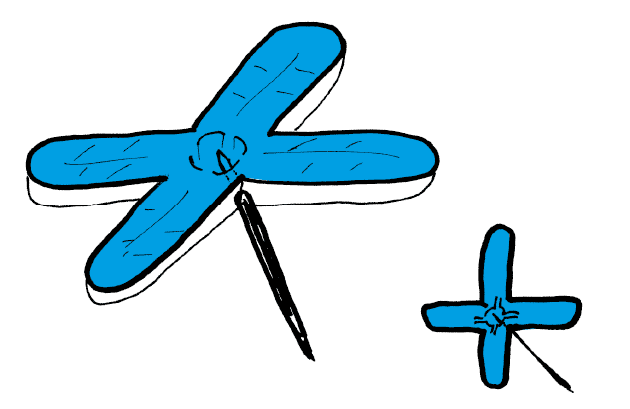
The Gripper is a Pneunet design that is based on the Slow Pneunet architecture. It is designed by Ben Finio. It has 2 variations - Gripper and Mini Gripper.

Fabrication
The fabrication process is described in detail on the Instructables page.
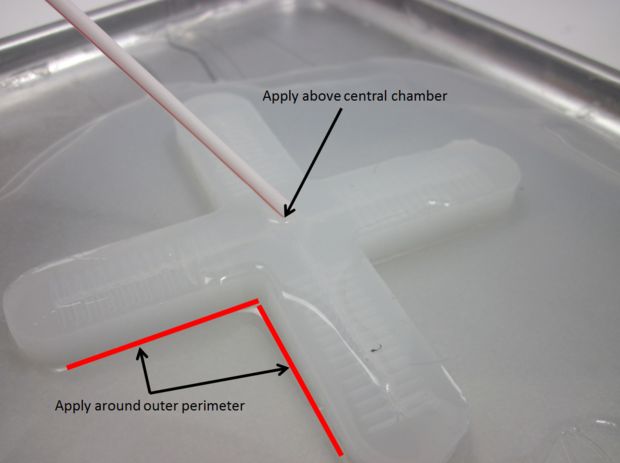
Take note of Stage 11, where extra sealing is necessary on the top layer after gluing.
Mold files
The molds are available for download on Thingiverse. Additionally, a base bold that supposedly has more gripping power was published on Thingiverse by XYZAidan.
Quantities
- Mini Gripper - Top Layer: ~10g
- Gripper - Top Layer: ~40g
- Baser Molds: ~8g
Oven times
- Top Layer - Ecoflex 30: ~15min
- Bottom Layer - Dragon Skin 30: ~30min
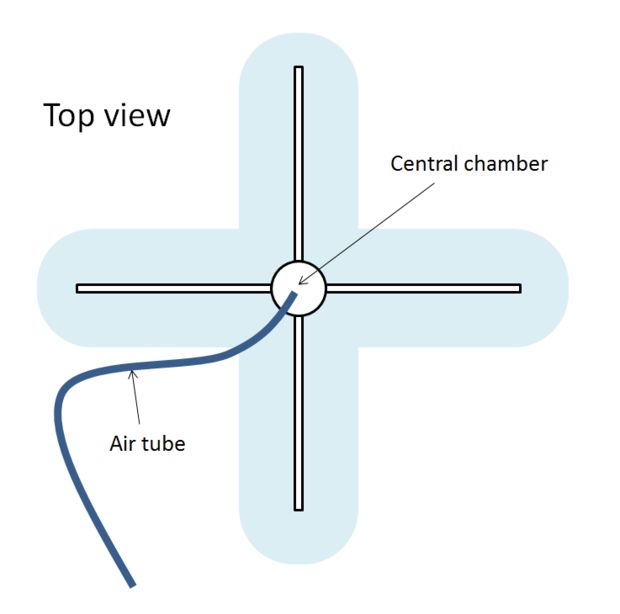
Air inlet
From the instructables guide:
Puncture the robot from the side, at a 45 degree angle in between two of the "legs". Aim for the circular central chamber that connects the four air channels.
Issues
We found that even after applying reinforcement on top of the gripper, it is quite fragile and can tear or pop easily after curing. We recommend to only pump a small amount with the syringe to make sure there are no holes and then let it cure for at least half a day.
