
soft-robotics:molds:slow-bending
This is an old revision of the document!
−Table of Contents
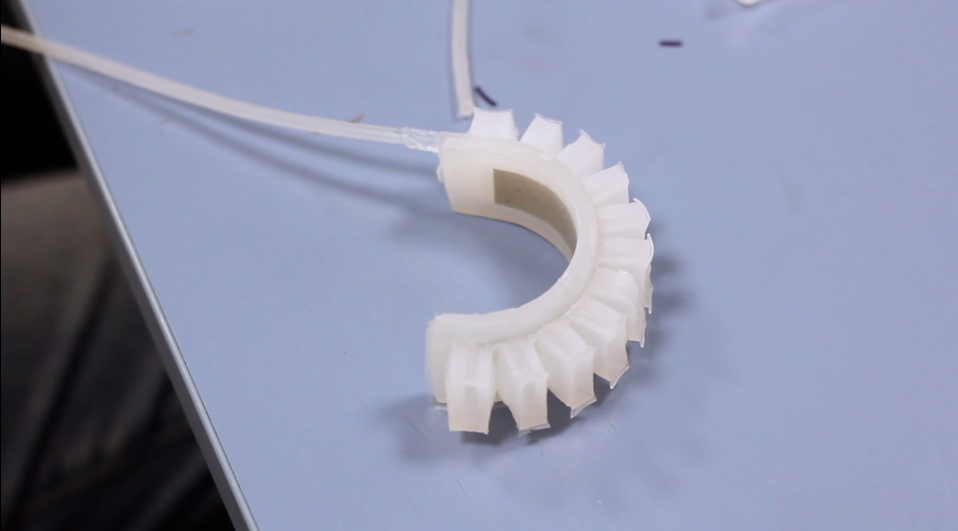
Slow Bending Actuator
The Slow Bending Actuator is a basic Pneunet design that is based on the Slow Pneunet architecture. It is based on a research by Harvard University and the molds on this wiki are designed by Jonas Jørgensen - Researcher at the IT University of Copenhagen.
Fabrication
The fabrication process is based on the slow pneunet design and is similar to the one of the triangle mold and the gripper mold.
Mold files
Here are the mold files for the actuator:
Machine Limitations
The bottom half of the top layer cannot be laser cut.
Quantities
Basic shape
- Top layer: ~35g
- Base Layer: ~5g
Oven times
Basic shape
- Dragon Skin 30: ~35min
- Ecoflex 30: ~15min
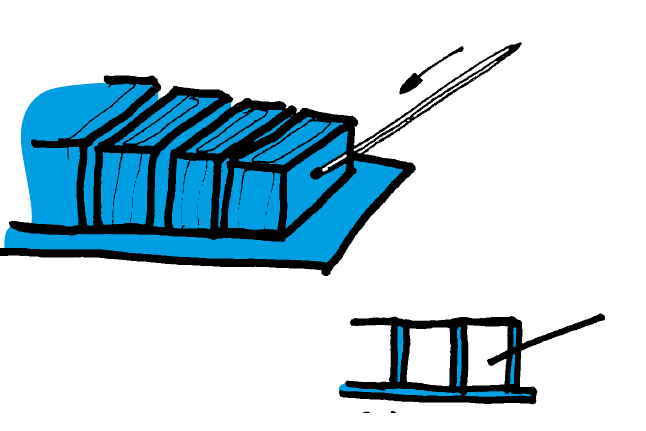
Air inlet
From the toolkit website:
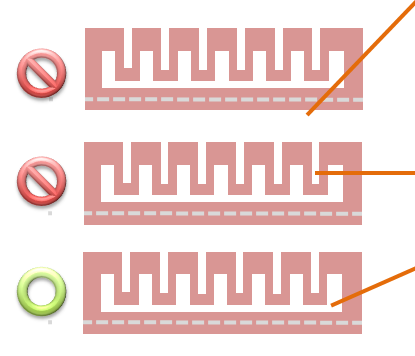
Using a thin metal rod, pierce the end of the actuator, an equal distance from both sides and about 1/8” (3mm) from the bottom. Aim the rod slightly downwards and don’t push it in too far. The goal is to reach the central channel without puncturing any of the actuator’s walls.
soft-robotics/molds/slow-bending.1494236561.txt.gz · Last modified: 2017/05/08 09:42 by avnerus
Except where otherwise noted, content on this wiki is licensed under the following license: CC Attribution-Noncommercial-Share Alike 4.0 International
