
soft-robotics:fast-pneunet
Table of Contents
Fast Pneunet
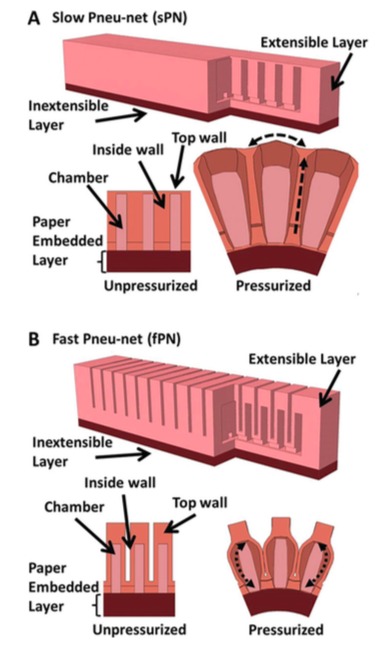
The design of fast pneummatic networks was first outlined in the Harvard University paper: Pneumatic Networks for Soft Robotics that Actuate Rapidly. Its fabrication process is described in the Soft Robotics Toolkit website.
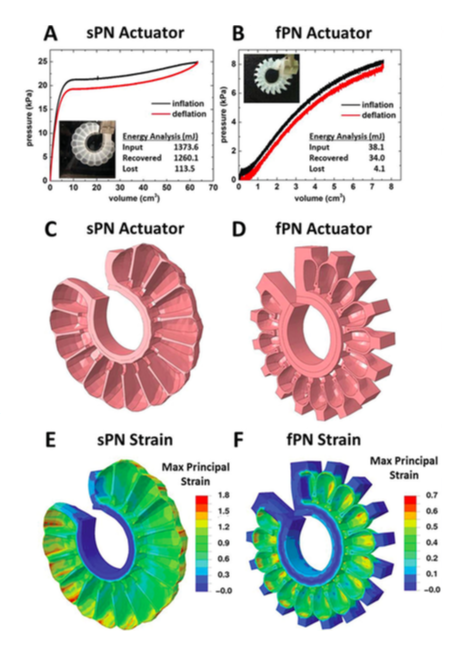
As opposed to Slow Pneunets that are composed of uniformly interconnected pressurized cells, the fast pneunet inserts a gap between cells in order to minimize the volume that is pressurized. This results in a more efficient design that requires less pressure in order to actuate.
Molds
These molds are designed as Fast Pneumatic Networks:
Silicone Layers
We have successfully experimented with the following layer combinations.
| Top layer (extensible) | Bottom Layer (inextensible) |
|---|---|
| Dragon Skin 30 | Dragon Skin 30 + Office Paper |
| Dragon Skin 30 | Dragon Skin 30 + Steel Mesh Paper |
| Ecoflex 30 | Dragon Skin 30 |
| Ecoflex 30 | Dragon Skin 30 + Office Paper |
soft-robotics/fast-pneunet.txt · Last modified: 2017/04/16 15:10 by avnerus
Except where otherwise noted, content on this wiki is licensed under the following license: CC Attribution-Noncommercial-Share Alike 4.0 International
